一、序言
Simotion是西门子推出的全新的运动控制系统,相对于PLC控制有很大的优势:(1)Simotion用“轴”的概念对控制对象进行定义,通过参数化的设置实现目标对象的运动,最终对加工工艺的编程直接采用操作目标“轴”的方式进行。(2)一般程序默认的扫描周期为7ms,比普通的PLC的扫描周期更短,能满足高速精密的运动控制场合的要求。
Simotion和传统的PLC控制有很大的差别,其各自的优缺点比较如下[1]:
(1)传统的PLC采用分布式I/O模块对执行对象进行控制,对象的传感器信号也是通过分布式I/O模块进行传输,采用的控制策略是直接控制目标信号,编程过程中直接控制的是执行对象的控制信号。优点是控制方便实现,且易于调试,缺点是灵活性差。
(2)采用Simotion运动控制系统,利用IM174模块的轴集成功能,可以控制模拟驱动器和步进电机,对要实现的运动进行对应轴的配置,配置对应轴的类型和反馈信号,编程直接对轴进行操作。优点是,采用Simotion直接对轴进行操作的编程方式,可以灵活的根据现场情况,快速的调整轴的运动方式,容易满足生产柔性自动化的要求。缺点是,前期“轴”的调试工作较为复杂,花费的时间较长。
旋挖钻机是大型建筑、桥梁桩基础施工的主要设备,在施工中噪声小、振动小、油烟污染也较小,应用广泛。旋挖钻机一般由行走机构(履带底盘)、工作机构(主副卷扬、桅杆总成、伸缩式钻杆等)、回转机构、动力机构(回转动力头)、操作控制机构组成,其工作的核心元件是动力头、钻杆和钻头。
在控制过程中,需要实现各个动作能独立运动,而且能方便实现各动作的组合。随着自动化集成程度的提高,工程机械也逐渐能实现自动化施工,减小因人员操作造成的误差。基于SimotionD将操作对象抽象为轴的概念,对“轴”的参数进行配置和调试,应用中便于更改“轴”的相互运动关系,实现客户个性化的定制要求,在传统旋挖钻机市场饱和度情况下开拓新的思路。
二、控制系统的构成
(一)硬件组成及组态
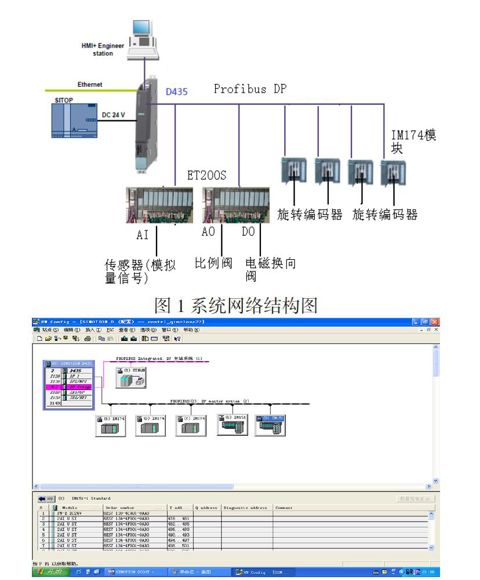
硬件设备采用的是运动控制系统SIMOTION。SIMOTION系统主要由人机界面操作屏,SimotionD435,IM174模块,IM151模块,比例阀及传感器等组成。系统的网络结构如图1所示。
选用的产品类型及应用特点:
1.SimotionD435:较优的轴同步控制的功能,最多支持32轴,通过“轴”的定义,既可以方便实现旋挖钻机的基本运动,又可以实现多动作联动,提高成桩的精度。
2.IM174模块:具有步进和模拟驱动两种方式,支持控制4根轴,由于旋挖钻机的精确控制对象为电液比例阀,所以控制应用中主要是模拟驱动。
3.ET200S:分布式的I/O模块,可以根据传感器的位置和驱动对象的位置,将ET200S布置于旋挖钻机的桅杆或其他位置,节省信号线的布线。
控制系统方案的设计:
首先对目标控制对象进行轴的定义,针对旋挖钻机的工作:整机行走、履带展宽,上车回转、变幅上下、桅杆倒立桅及倾斜、主卷扬提升、副卷扬提升、动力头回转。因此需要分成9根“轴”分别进行控制。
根据设计的控制方案及系统的网络结构图,在Scout软件中对硬件结构进行组态,如图2所示,注意组态。
(二)控制实现
基于控制过程方便实现的原则,对旋挖钻机动作控制定义的轴选用不同的控制方式。
1.对于旋转轴动力头和上车回转,配备旋转编码器,采用IM174模块直接配置编码器数据及轴运动参数,即可实现旋转轴的运动。
2.对于其他控制对象,比如油缸运动,传感器输出的是对应变量的电压信号,需要先将模块采集得到的电压信号转换为对应的物理量信号,再用得到物理量代入程序进行运算,得到控制的输出电压值。
3.由于控制对象为电液比例阀,而执行对象是液压缸或马达,从阀芯动作到末端执行对象响应的时间较长,若程序执行周期过短会使末端执行对象不能实现对给定信号的及时响应,造成控制上的误差,因此需要加大程序执行周期,具体执行周期需要在调试过程中确定。
三、结束语
Simotion运动控制系统的设计研发非常的严谨,只有当所有的外部条件都满足的情况下,对应“轴”才能有输出,更加的保证了工程机械的安全性。随着工业自动化程度的提升,工程机械施工自动化也在逐渐的推广,旋挖钻机现已实现自动调垂、自动倒立桅,目前对钻机自动对孔,自动成桩的期望也越来越高,减小施工中因人为原因造成的斜孔或桩孔垂直度较差等问题。因此在应用中采用simotion运动控制系统,将各个单独运动对象抽象为控制轴进行控制,既简单方便,又能方便实现多动作联合,并且能根据不同的施工项目进行调整,而无需更改硬件组成,柔性化程度高。
参考文献:
[1]廖常初.S7-300/400PLC应用技术[M].北京:机械工业出版社,2005.1.
[2]Simotion编程手册.




 成功提示
成功提示 错误提示
错误提示 警告提示
警告提示




评论 (0)